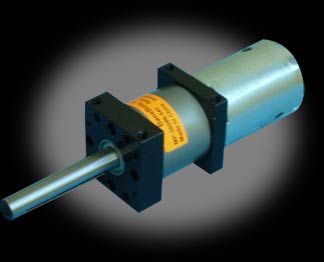
These gearmotors are custom made for robotic applications. They feature all metal planetary gears and use two ball bearings to support the shaft. The integrated motor mounts and extra long shafts make them easy to integrate into your design and eliminate the cost and complexity of separate motor mounts and shaft extenders.
A durable, 5-pole balanced armature, RS-540 motor comes standard with these gearboxes. If this motor does not meet your needs, it can be easily replaced with any motor having a 3.2mm shaft and a standard RS-540/550 mounting pattern.
IMPORTANT NOTE:
Mounting a large load to the end of an unsupported shaft may damage the gearmotor!!!
The shafts on these motors are supported by two ball bearings making them fairly rugged; however, we do not recommend them to be used with large overhung loads. We recommend using a design that supports the end of the shaft. If it is not possible to support the end of the shaft, we recommend mounting the load as close to the face of the gearmotor as possible and cutting the shaft to length.
Gearmotor Specifications
| Physical |
| Type |
: Planetary | | Reduction | : 64:1 | | Stages | : 3 | | Gear Material | : All Metal | | Weight (Gearbox only) | : 7.2 oz | (205g) | | Weight (with motor) | : 12.6 oz | (358g) | | Length (Gearbox only) | : 1.9 in | (49mm) | | Length (with motor) | : 4 in | (102mm) | | Width (Sqaure) | : 1.5 in | (38mm) | | Shaft Diameter | : 0.375 in | (10mm) | | Shaft Length | : 2.15 in | (55mm) | | Shaft Key | : 0.125 in | (3.2mm) | | Shaft End Tap | : #8-32 | | Mounting Holes (12) | : #10-32 | | | Calculated Performance* | | Motor | : RS-540 (Pinion) | | Operating v | : 4.5v - 12v | | Nominal v | : 12v | | No Load RPM | : 263 | | No Load A | : 1A | | Stall Current | : 42A | | Stall Torque | : 2527 oz-in | 17843 mN-m | | Kt | : 60.2 oz-in/A | 425 mN-m/A | | Kv | : 22 rpm/v | | RPM - Peak Eff | : 227 | | Torque - Peak Eff | : 397.1 oz-in | 2804 mN-m | | Current - Peak Eff | : 6.6A |
|
*All performance numbers are calculated using motor data at Nominal Voltage - they do not factor in loss from the gearbox. BaneBots recommends designing to Peak Efficiency - excessive current or torque requirements may reduce the life of the gearmotor